Version 2.0
|
Spider
Keyer (Arduino Nano CW Keyer) Version 2.0 |
Why Spider Keyer?
(1) Unlike WinKeyer (2) Unlike K3NG
Schematics: |
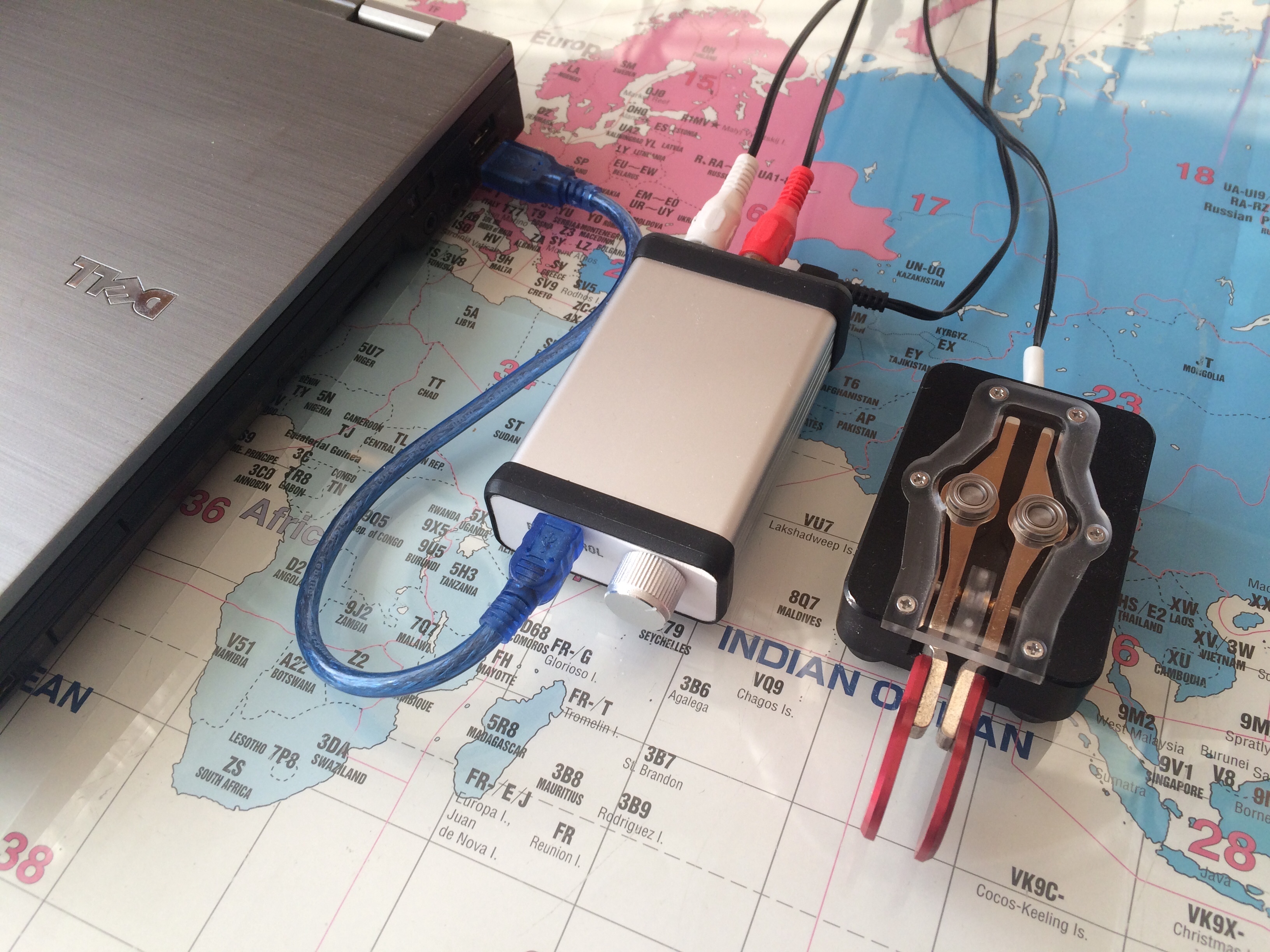
Spider Keyer was mainly
developed as a companion to HamRacer logging software. Spider Keyer enables you to:
|
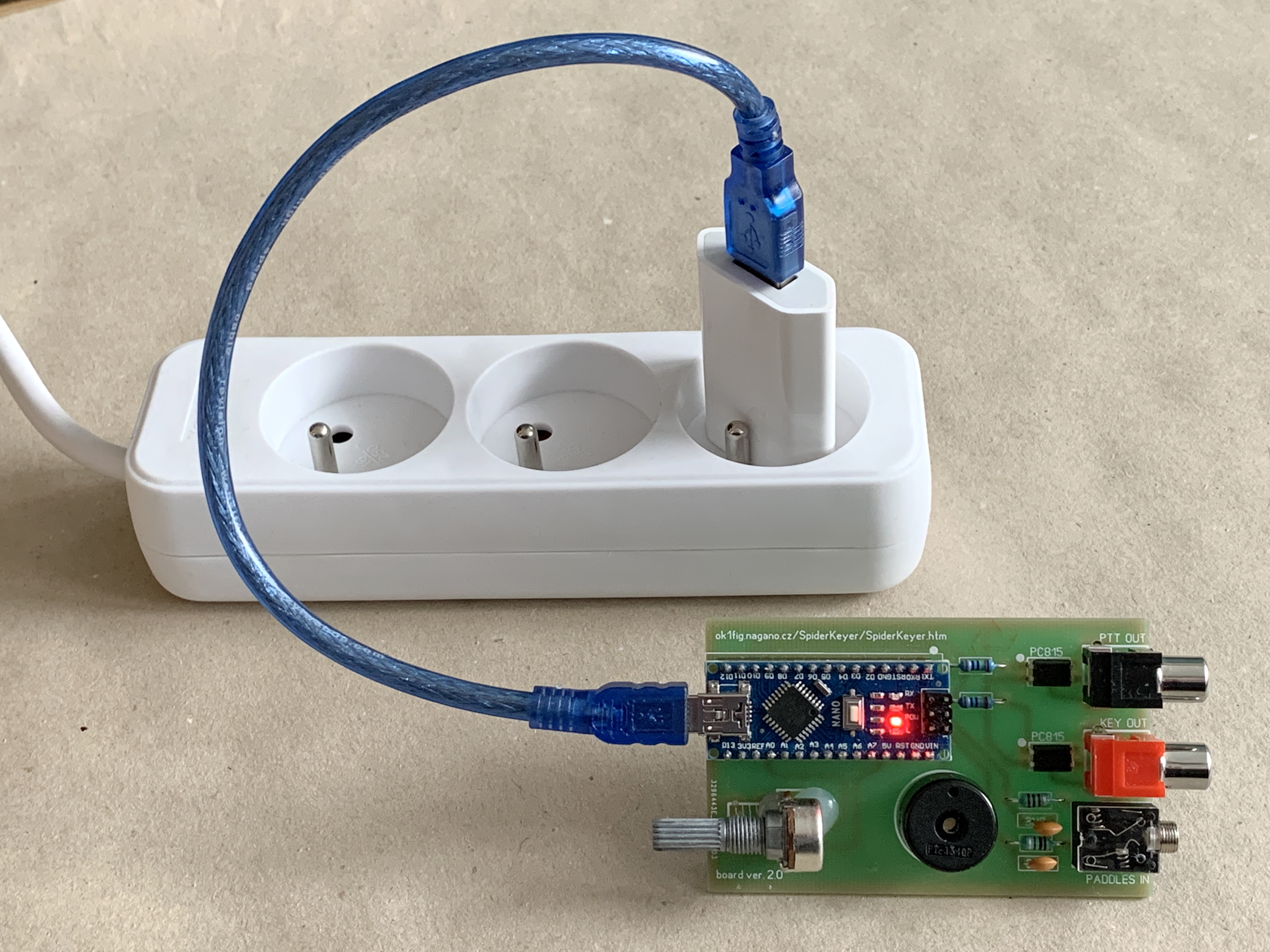 |
Stand-alone Spider Keyer sourced through a mobile phone charger. |
 |
Stand-alone Spider Keyer sourced from a power bank. |
| Make use of the kit to get a professionally looking result. More on the kit | |
 |
 |
 |
Ready to do the things
yourself? Visit Spider Keyer Home Made page for all the information you need. (PCB layout, the sketch for Arduino Nano, SprintLayout source files, etc) |
 |
Are you a developer? Visit Spider Keyer Specifications page for a detailed information. (A description of the communication |